车云按:自动泊车系统可以辅助或代替驾驶员完成泊车操作,是目前智能汽车技术研究的热点之一,那么国内外全自动泊车系统的发展应用现状是怎样的?我们又该如何看待当前自动泊车技术水平的高低?要回答这两个问题,让我们从自动泊车技术的分类说起。本文来自《汽车工业研究》,原文标题为《基于消费者认知的 自主泊车系统评价指标研究》,车云菌有所删改。
智能交通系统(Intelligent Traffic System)、智能汽车、无人驾驶等概念逐步成为人们关注的热点。自动泊车技术是汽车智能驾驶技术之一,现已产品化的自动泊车系统主要有两种:
一种是由系统自动控制转向盘,驾驶员控制加速及制动踏板,两者配合完成泊车动作的半自动泊车系统。此类系统应用相对普遍,诸如大众途安、途观、昊锐及奥迪S6等车型配备的泊车入位系统;
另外一种是基于半自动泊车系统发展而来的全自主泊车系统,亦称全自动代客泊车系统或遥控泊车系统。它可以代替驾驶员独立完成泊车动作,不需驾驶员坐在车上。拥有该系统,驾驶员在车辆到达停车场门口时即可下车,通过智能手表、手机、或遥控钥匙给汽车发出信号,汽车即可自行驶入停车场,并熄火落锁。此类系统仅少数豪华车有所应用,主要依托车联网技术实现,诸如宝马i3,奥迪A7。
自动泊车技术逐渐由辅助泊车发展为替代驾驶员泊车,但各汽车OEM仍将其视为高科技魅力配置,仅标配中高级车的旗舰车型或者提供选配,技术应用的脚步落后于研发速度。这与该系统的技术成熟度、成本高低以及当前社会法律有关,也与消费者对该系统的评价和认知有关。
全自动泊车系统的关键技术
自动泊车系统主要由4部分组成:
1.人机交互终端模块,实现泊车命令的下达、泊车状态的监控及调整;
2.环境感知模块,实现泊车位识别、综合定位及定向、障碍检测、处理环境数据信息;
3.路径规划模块,根据车辆自身状态、环境障碍信息、库位的位置及大小,规划出无障碍泊车路径;
4.路径跟踪控制模块,对车辆进行纵向及侧向控制,使车辆按规划路径泊入库位,并执行制动。
人机交互终端的关键技术在于系统的灵敏流畅及稳定性,重点提升人机交互的友好性环境;感知的关键技术在于车辆精确的相对定位及泊位识别,其中泊位识别技术的重点在于融合多传感器信息,更准确判别泊位环境,诸如井盖、松散路肩被雪覆盖的凹陷等;路径规划模块的关键技术在于解决任意泊位上路,路径规划的实时无障碍性且车辆可执行性;路径跟踪控制模块关键技术在于有效耦合纵向及侧向控制,保证车辆跟踪的精确度
。
全自动泊车系统应用现状
随着智能汽车技术的发展及相关研究的深入,各OEM相继推出配备自动泊车系统的车型。国外OEM如宝马、奥迪、奔驰、大众丰田、雪铁龙、福特、现代等都已将该系统标配或选装到量产车型上,而国内仅部分合资企业车型搭载该系统。国外全自动泊车技术研发较为积极,而国内相对缓慢。
2012年,日产依靠4G网络及云端服务,将NSC-2015车辆联网,在室内及地下停车场环境,成功实施了无人全自主泊车,车辆接受泊车命令后自动驶入停车场寻找泊位,完成泊车并实时传递车辆状态。这项技术预计在今明两年进入市场。同日产一样,2013年奥迪借助WiFi连接,App遥控方法,使用智能手机远程控制车辆,实现车辆的自主泊取(见视频)。
奥迪A7遥控泊车
2013年8月福特首次公演全辅助泊车系统,该系统可满足驾驶员站在车外完成泊车过程,目前尚处于试制阶段。2014年底沃尔沃新款XC90上市,该车配备了基于V2I的无人全自主泊车系统。
国内比亚迪公司早在2005申请了自主泊车专利,但至今未应用于具体车型。2006年一汽集团研制的HQ3自主驾驶系统实现了多种智能驾驶技术,包括自动泊车。2014年上汽集团基于电动车E50展示了智能驾驶技术,同样包含全自主泊车,车主通过手机App控制车辆实现车辆的自主泊取。与日产、奥迪、沃尔沃的全自主泊车系统不同,该系统不能自主寻找泊位,需要车主预先通过手机App选择停车位。
中国用户如何看待自动泊车系统?
自动泊车技术的优劣,最终还是用户说了算。为了解中国消费者对自动泊车系统的认知及评价,我们对40位有泊车辅助系统或全自动泊车系统使用经验的用户进行了调研,它们当中有奥迪、宝马、雷克萨斯以及沃尔沃的车主。从调查中欧美总结了其对自动泊车系统的认知评价以及期望。典型问题摘录如下:
(1)车位偏短
调研的40名车主中,有49%的人会面临前后有障碍的平行泊车任务。而平行泊车普遍被认为比垂直泊车或斜方位泊车难度高(下图)。
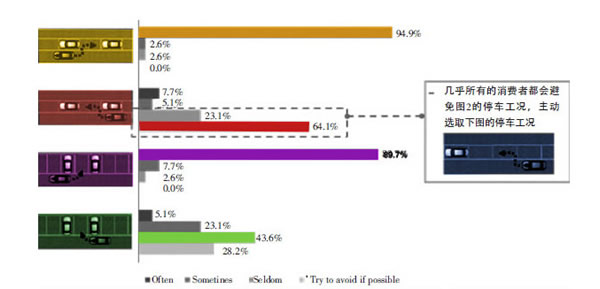
受访用户常见的泊车需求分类
《城市道路路内停车泊位设置规范》(GA/T 850-2009)规定了城市路内泊车位置设计标准:泊位长6米,宽2.5米,这样的泊位对于宝马X6(长度为4929毫米,宽度1989毫米) 级别的车而言,执行前后有障平行泊车时略显空间不足。车主普遍认为这种情况下需要自动泊车系统进行泊车支持。
(2)找车位难+车位偏窄
受访者一致认为最突出的泊车困扰是寻泊时间过长。目前停车难问题像一场瘟疫在各大城市蔓延,司机到达目的地后不得不花额外的时间寻找合适的泊位。
受访者常见泊车困扰
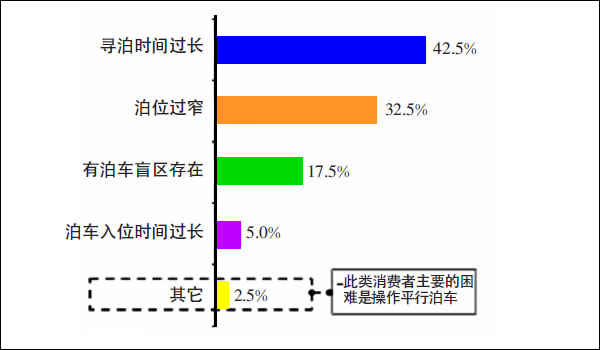
本次调研(上图),42.5%的车主不愿忍受较长的寻泊时间,期待体验全自动代客泊车系统。另外,32.5%的受访者认为泊位过窄,还有17.5%的消费者认为泊车盲区的存在也是影响安全泊车、困扰自己的重要隐患,此时倾向于借助自动泊车系统实现安全泊车。
(3)关于遥控泊车
目前市场上半自动泊车系统相对较多,遥控泊车技术虽有一定的技术优势,但由于造价、消费者的接受度等综合原因,应用规模目前仍小于半自动泊车系统,国内量产的只有比亚迪的遥控驾驶。总结消费者的观点可知,遥控泊车有更为便捷的使用场景,但是目前技术成熟度不能够量化,尚无统一评价标准,有过泊车辅助系统使用经验的人也对其持不信任态度。
(4)现行系统的不足
受访者中对自动泊车系统不满意的有5人,主要的问题在于泊车结束后,车身歪斜、车辆没有停在车位正中间。这说明已投产的自动泊车系统仍有失误的可能,这种情况下消费者不得不自行重新泊车。
能够得到消费者认同,令消费者满意的全自主泊车系统才有生命力,根据消费者反馈,一套优秀的全自主泊车系统应该能够可靠完整地实现系统功用,有较好稳定性,低频次失误。
如何评价自动泊车系统优劣
针对自动泊车系统泊车能力的测试或评价仍没有统一的方法或标准。国内外已有的研究方式多为举办各种级别的智能汽车大赛,通过比赛成绩评价智能汽车完成某项任务的能力。国外没有国内更不可能了。
如何系统客观地评价全自动泊车系统泊车能力,涉及到智能科学认知科学、以及计算机科学、信息科学等多个学科。但如果从最终用户需求的角度出发,从“重点性、准确性、可比性、可度量性、独立性、定性定量”相结合来考量,或许能够找到一种正确的评价方式。
结合消费者调研,本文选取了4项指标来对自动泊车技术做出评价:
1.泊车入位时间。受法律条款的限制,目前尚未有真正意义上的无人全自主泊车系统应用于汽车产品。即便是宝马搭载的全自主泊车系统可以完成无人全自主泊车,但为避免因系统不稳定性存在的风险而导致事故责任无法划分,仍要求位于车外的车主在使用该技术时,保持对远程控制端的持续监控,直至车辆完全泊入车位。所以整个泊车入位过程花费的时间依旧是值得考量的一项指标,可以借助计时工具计时。
2.泊车过程中轨迹曲率的连续性。泊车轨迹的曲率连续性与很多因素有关,例如:控制算法性能、算法参数的选取、车辆初始方位等。该项指标可以通过测试人员根据测试过程进行定性评价。
3.泊车结束后,车辆中心与泊位中心位置的距离。系统将车完全停入泊位是系统最基本的功能。该项指标是检查车辆是否完全入库最简单便捷的标准。该项指标的检测可以通过不断调整车辆与泊位的相对角度及相对距离多次试验取平均值作为参考。
4.泊车结束后,车身纵向中轴线与泊位纵向中轴线的夹角。根据消费者的认知反馈得知,自动泊车系统完成泊车动作后,车身停放不正令消费者满意度降低。该指标的选取能够表明任意泊位上,泊车结束后,车身是否泊正。
取上述4项指标作为全自主泊车系统泊车认知能力的评价指标,首先满足各指标相互独立性、可度量性、可比性等指标选取的一般规则且简单易测评;其次可以使符合条件的系统能够满足消费者预期;再者能够体现全自主泊车系统在泊车环境发生变化时,系统对车辆控制的变化;最后还能兼顾经济节能,指标1和指标2还可以表明车辆在整个泊车过程中的能耗:泊车时间越短,泊车曲率越连续,能耗也越小。
车云小结:
作为初级自动驾驶技术分支之一的全自动泊车,在日渐拥挤交通环境的今天,应用需求十分强烈。而如何区分各家泊车辅助和全自动泊车技术的优劣、促进这一技术的普及,则是我们所关注的一个焦点问题。用更加科学的手段来做出评价,目前来说还比较困难。而本文虽然只是一个初步探讨,但车云菌觉得,从用户需求的角度出发,这样的评价方法也不无可取和实用之处。