ADAS and Autonomous Driving Industry Chain Report 2018 (I) - Computing Platform and System Architecture
ADAS and Autonomous Driving Industry Chain Report 2018 (I) - Computing Platform and System Architecture underscores the followings:
 Introduction to ADAS and autonomous driving;
Introduction to ADAS and autonomous driving;
ADAS and autonomous driving market forecast;
ADAS and autonomous driving strategy of carmakers including Geely, GM, SAIC, Dongfeng, Great Wall, GAC, Chang’an, NIO, Xpeng and BYTON;
Software architecture of ADAS and autonomous driving, including AUTOSAR Classic and Adaptive, ROS 2.0 and QNX;
Hardware architecture of ADAS and autonomous driving, including automotive Ethernet, TSN, Ethernet switch and gateway, and domain controller;
Safety certification of ADAS and autonomous driving, including ISO26262 and AEC-Q100;
Study into processor firms, including NXP, Renesas, Texas Instruments, Mobileye, Nvidia, Ambarella, Infineon and ARM.
According to ResearchInChina, the Chinese ADAS and autonomous driving market was worth about RMB5.9 billion in 2017 and is expected to reach RMB42.6 billion in 2021 at an AAGR of 67% or so.
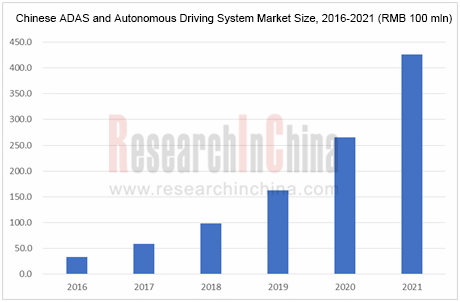
Automotive vision, MMW radar and ADAS are the market segments that develop first with the MMW radar market enjoying an impressive growth rate, closely followed by low-speed autonomous driving. While LiDAR, commercial-vehicle autonomous driving and passenger-car autonomous driving markets lag behind.
As the automobile enters an era of ADAS and autonomous driving, product iteration races up and lifecycle of products is shortened. The automotive market is far smaller than consumer electronics market but sees bigger difficulty in design and higher design and production costs than that in consumer electronics market. Thus automotive ADAS and autonomous driving processor is confronted with higher risks. Hence adequate financial and human resources are required to support the development of automotive ADAS and autonomous driving processors. Globally, only very a few enterprises like NXP and Renesas are capable of developing whole series of ADAS and autonomous driving processors.
With regard to safety certification, autonomous driving chips must attain ASIL B at least, a level only Renesas R-CAR H3 has reached for now. As GPU is a universal design and not car-dedicated design, it is hard to reach the certified safety level of ISO26262 from the point of design. The certification cycle of ASIL is up to two to four years.
Reliability, precision and functionality of stereo camera are well above that of mono camera, but as the stereo camera must use FPGA, it costs much. High costs restraint the application of the stereo camera only on luxury cars. However, with emergence of Renesas and NXP hardcore stereo processors, the stereo camera will be vastly used in ADAS and autonomous driving field, expanding from luxury models to mid-range ones.
With an explosive growth in data transmission, automotive Ethernet will become a standard configuration of the automobile, and Ethernet gateway or Ethernet switch is indispensable to autonomous driving.
Autosar will act as a standard configuration in ADAS and autonomous driving field.
CNN/DNN graphics machine leaning: GPU is most suitable when data is irrelevant to sequence. Nvidia GPU can be used in multiple fields except for automobile and finds shipments far higher than that of automotive ASIC, enjoying superiority in cost performance. TPU lifts speed and reduces power consumption (only 10% of that of GPU) at the expense of the precision of computation.
RNN/LSTM/reinforcement learning sequence-related machine learning: FPGA has distinct advantages, particularly in power consumption, consuming less than one-fifth of GPU under same performance. However, high-performance FPGA is incredibly costly. FPGA can also process graphics machine leaning and improve performance by reducing precision.
ASIC stands out by performance-to-power consumption ratio but has shortcomings of long development cycle, the highest development cost and the poorest flexibility. The unit price will be very high or firms will make losses if the shipments are small (at least annual shipments of 120 million units if 7-nanometer process is employed). Most ASICs for deep-learning graphics machine learning are similar to TPU.
Power consumption and cost performance are crucial in in-vehicle field. GPU is no doubt a winner in graphic machine learning. However, as algorithms are constantly improved, the ever low requirements on the precision of computation, and low power consumption will ensure a place of FPGA in graphics machine learning. FPGA has overwhelming advantages in sequence machine learning.
Autonomous driving can be divided into two types, one represented by Waymo, which has solved most of the problems concerning environmental perception and concentrates on behavior decision-making with computing architecture of CPU+FPGA (usually Intel Xeon 12-core and above CPU plus Altera or Xilinx’s FPGA; the other represented by Mobileye which has not solved all problems involving environmental perception and concentrates on it with computing architecture of CPU+GPU/ASIC.
CPU+GPU will be the mainstream in the short run, but CPU+FPGA/ASIC may dominate in the long term, largely due to continuous decline in the precision of computation of graphics because of improvement in algorithms and performance of sensors (LiDAR in particular), which is conducive to FPGA, while it is hardly for the power consumption of GPU to fall. It is easier for FPGA to meet car-grade requirements.
In chip contract manufacturing field, TSMC has won all 7-nanometer chip orders, including A12 exclusively provided for Apple, marking for the first time TSMC overtook Intel to become the vendor with the most advanced semiconductor manufacturing process, a must in the production of digital logic chip whose computing capability is underlined in AI autonomous driving.
OEMs and Tier1s’ Intelligent Cockpit Platform (Hardware and Software) Innovation Strategy Research Report, 2026
Intelligent Cockpit Platform Research: multi-dimensional cockpit system architecture reconstruction for multi-agent collaboration and proactive intelligent services
The intelligent cockpit software s...
Automotive AIOS Research Report, 2026
Automotive AIOS Research: Mass Production Solutions Are Implemented
Mass Production Solutions Are Implemented on A Small Scale.
In 2026, AIOS starts small-scale implementation, helping to improve v...
Automotive Telematics Service Provider (TSP) Research Report, 2026
TSP Research: Leading providers collectively turn to AI agents to provide all-scenario active services
Telematics Service Providers (TSPs) are the core hub of the telematics industry chain, connectin...
Automotive Smart Interior Research Report, 2026
Smart Interior Research: As Technologies like Interactive Starlight Headliner, Hidden Display and Surface Projection Are Launched, Automotive Interiors Become Ever More Intelligent
The Automotive Sma...
Research Report on AI Applications in Cockpits, 2026
AI Application in Cockpits: AI Services Become More Comprehensive, Convenient, and Refined.
In the first half of 2026, cockpit AI functions underwent initial upgrades across multiple dimensions, inc...
Software-Defined Vehicles in 2026: OEM Software Development and Supply Chain Deployment Strategy Research Report
Research on OEMs’ Software Strategies: R&D Focus, Development Strategies and Supplier Building Models of 30 OEMs
In this paper, we adopt a research framework covering 13 subsystems and 48 sub-di...
Passenger Car Chassis Domain Control and Chassis Cross-Domain Integration Research Report, 2026
Chassis Control Research: Mass Production of Full Chassis-by-Wire Solutions Starts
1. A Cluster of Full Chassis-by-Wire Solutions Make Their Debut, and EMB Enters Mass Production and Adoption for the...
Central Domain Control (Powertrain, Chassis, Body) and Motion Controller Research Report, 2026
Central Domain Control and Motion Control Research: XYZ Coordinated Control and Full X-by-Wire Actuation System
With the gradual penetration of L3+ autonomous driving, the chassis control system is ...
48V Low-voltage Power Distribution Network (PDN) Architecture and Supply Chain Panorama Research Report, 2026
Research on 48V Low-Voltage Power Distribution Network (PDN): An Active 48V Supply Chain, with Priority Deployment in High-Power Scenarios Such as Steer-by-Wire Chassis
The automotive 48V low-voltage...
AI-Defined Vehicle (AIDV) OEMs' Deployment Strategies Research Report, 2026
AIDV Research: Deployment Strategies of 22 OEMs
The AI-Defined Vehicle (AIDV) OEMs' Deployment Strategies Research Report, 2026, released by ResearchInChina, analyzes the AI deployment strategies of ...
OEMs’ Passenger Car Model Planning Research Report, 2026
Vehicle Model Planning Research: Chinese OEMs Launch Sub-Brands Intensively, While Multinational OEMs Apply the Brakes to Electrification Strategies
ResearchInChina released the OEMs’ Passenger Car M...
Autonomous Driving Simulation and World Model Research Report, 2026
Autonomous driving simulation research: "Simulation test + world model"-driven test system has become R&D infrastructure.
The "Autonomous Driving Simulation and World Model Research Report, 2026"...
Cockpit-Driving Integration Central Domain Controller SoC and AI Supercomputing Architecture Research Report, 2026
Cockpit-Driving integration and AI supercomputing research: The One Chip solution is rapidly installed in vehicles, and AI supercomputing architectures are moving towards full-domain integration.
AI ...
Intelligent Driving End-to-End Large Model Research Report, 2026
Research on Intelligent Driving Large Models: A Critical Period for Technological Competition and Paradigm Integration
As autonomous driving technology rapidly iterates from L2 to L3?L4, intelligent...
Automotive Digital Key Industry Trend Report, 2026
Digital Key Research: Automotive BLE, UWB and SLE Hardware Layout
The Automotive Digital Key Industry Trend Report, 2026, released by ResearchInChina, analyzes and predicts the digital key market, co...
Monthly Report on Automotive New Technology (May 2026)
UHD gaze technology, full-color LiDAR, UWB, etc. promote the upgrade of intelligent driving perception capabilities
This report is published once a month and is available for annual subscription.The...
In-Cabin Monitoring Systems (DMS, OMS, etc.) Research Report, 2026
In-Cabin Monitoring System Research: DMS to Become Mandatory in 2027, Expected to be Installed in Over 14 Million Vehicles
ResearchInChina released the In-Cabin Monitoring Systems (DMS, OMS, etc.) Re...
Automotive Service-Oriented Architecture (SOA) and Cross-Domain Middleware Industry Report, 2026
Research on automotive SOA and cross-domain middleware: The era of AI atomic services and AI cross-domain fusion agents is coming.
Automotive SOA evolves towards AI + full SOA servitization Driv...